卷积神经网络
卷积神经网络(Convolutional Neural Network,CNN),用于图像识别、语音识别等场景
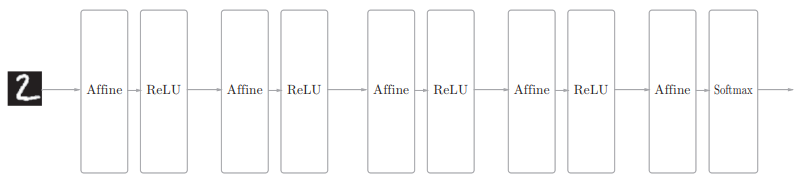
相邻层的所有神经元之间都有连接,称之为全连接,使用Affine层实现全连接层
下面是一个5层的全连接神经网络
可以看到,每个Affine层后面跟着激活函数层
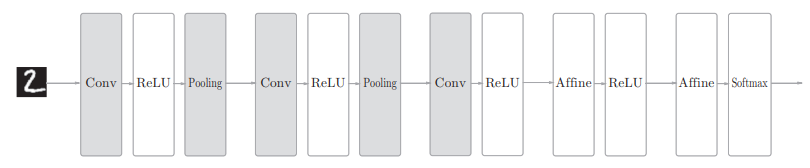
而基于CNN的神经网络结构如下
可以看到,CNN的层的连接顺序是 $Convolution - ReLU-Pooling$ ,Pooling层有时会被省略,另外,靠近输出的层中使用了之前使用了 “Affine-ReLU”组合
卷积层
回顾Affine层:
在全连接层中,相邻层的神经元全部连接在一起,输出的数量可以任意决定
它存在的一个问题是,忽视了输入数据的形状,如输入数据是图像(高、长、通道方向上的3维形状)时,输入到Affine层会将3维数据拉成1维的,无法利用与形状相关的信息
而卷积层Conv可以保持形状不变,当输入数据是图像时,卷积层会以3维数据的形式接收输入数据,并同样以3维数据的形式输出至下一层
在CNN中,有时将卷积层Conv的输入输出数据称为特征图(feature map),输入数据就叫输入特征图,输出就叫输出特征图
卷积运算
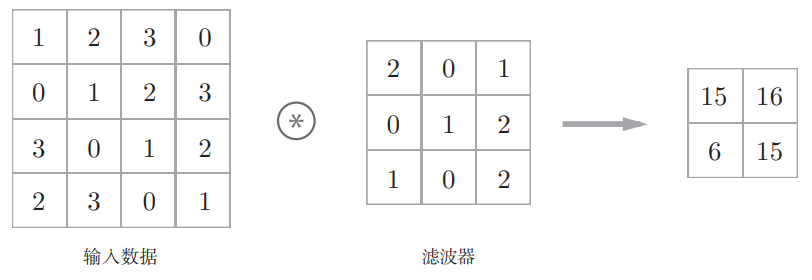
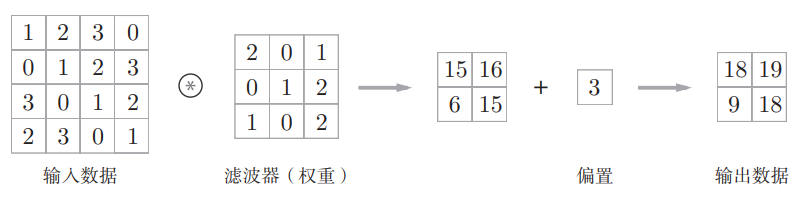
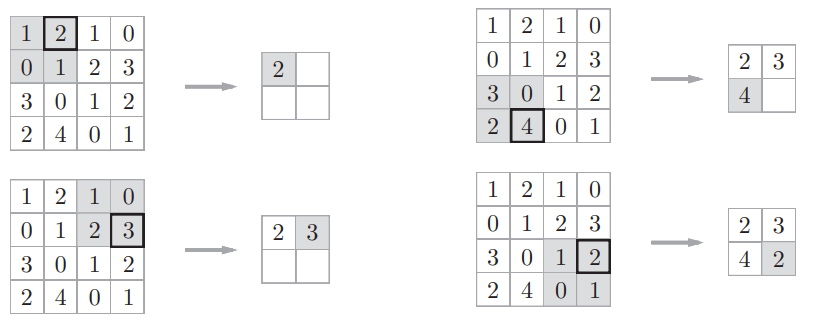
卷积层进行的处理就是卷积运算,结合例子说明(输入数据和滤波器之间的符号表示卷积运算)
这里的滤波器(filter)也被称为“卷积核(convolution kernel)”,滤波器是一个结构单位,里面的值就是权重。另外,输入数据和卷积核都是有高宽方向的形状的数据(height, weight),卷积运算的过程如下
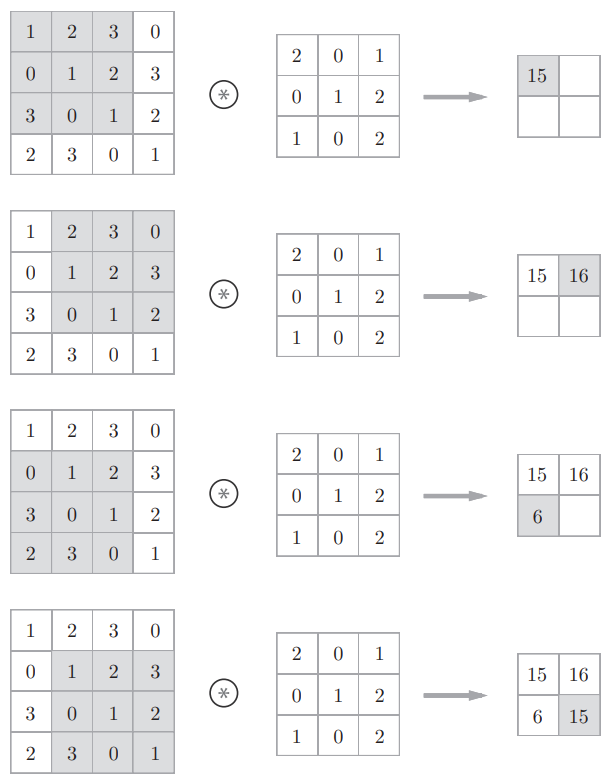
对于输入数据,卷积运算以一定间隔滑动滤波器的窗口并应用,将各个位置上滤波器的元素和输入的对应元素相乘,然后再求和(乘积累加运算),然后,将这个结果保存到输出的对应位置,所有位置进行一次,就可以得到卷积运算的输出
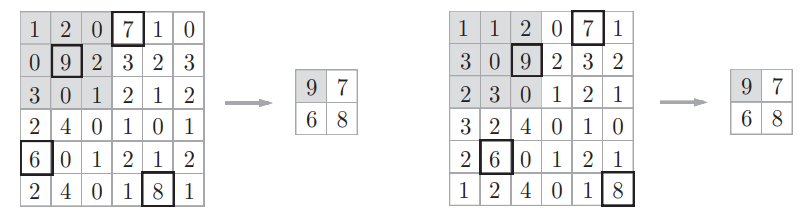
在全连接的神经网络中,除了权重参数,还存在偏置;在CNN中,滤波器的参数就对应之前的权重,且也存在偏置,包含偏执的卷积运算处理如下
上面的操作,本质上就是在进行多个 $ y = W \cdot x + b$ 运算,所以所有的输出都要 +b
填充
在进行卷积层的处理之前,有时要向输入数据的周围填入固定的数据(如0等),这称之为填充(padding)
为什么要进行填充操作呢?
通过之前的卷积操作过程,注意到,经过卷积运算的输入数据得到的输出数据,大小(空间)缩小了,而卷积层往往不止一层,多次卷积操作之后,可能会使得输出数据的大小变为1从而导致不能再进行卷积操作了(赘述)
所以,使用填充主要是为了调整输出的大小,之所以要进行填充,是因为如果每次进行卷积运算都会缩小空间(如(4,4)的输入,(3,3)的滤波器,输出是(2,2)),那么在某个时刻输出大小就有可能变为 1,导致无法再应用卷积运算
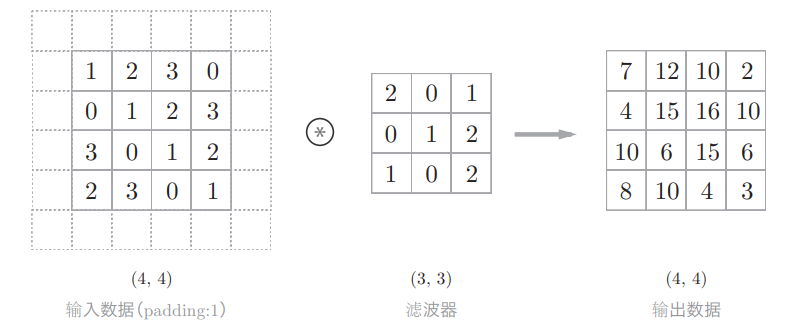
填充如何实现的,例:对大小为(4,4)的输入数据应用了幅度为1的填充
“幅度为1的填充”是指用幅度为1像素的0填充周围,填0的话直接省略不写,填充后,(4,4)的输入数据变成了(6,6)的形状
步幅
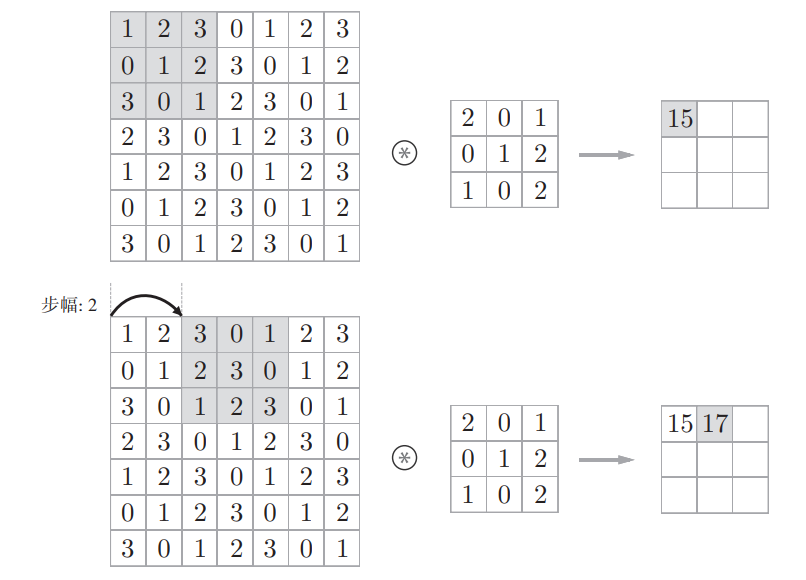
应用滤波器(卷积核)的位置间隔称为步幅(stride)
下面将应用滤波器的窗口的间隔变为2个元素
注意,步幅为2,意味着各个方向上(横向纵向)的移动都是2个元素
增大步幅后,输出大小会变小。而增大填充后,输出大小会变大,对于步幅和填充,计算输出大小
若输入大小为(H,W),卷积核大小为(FH,FW),输出大小为(OH,OW),填充为P,步幅为S,此时,输出大小可通过以下式子计算
$$
OH = \frac {H + 2P - FH} {S} + 1 \
OW = \frac {W + 2P - FW} {S} + 1
$$不过有一个问题是,分式的值可能是小数(除不尽的情况),这时需要采取报错等对策,采取的深度学习框架不同,当值无法除尽时,有时会向最接近的整数四舍五入,不进行报错而继续运行
3维数据的卷积运算
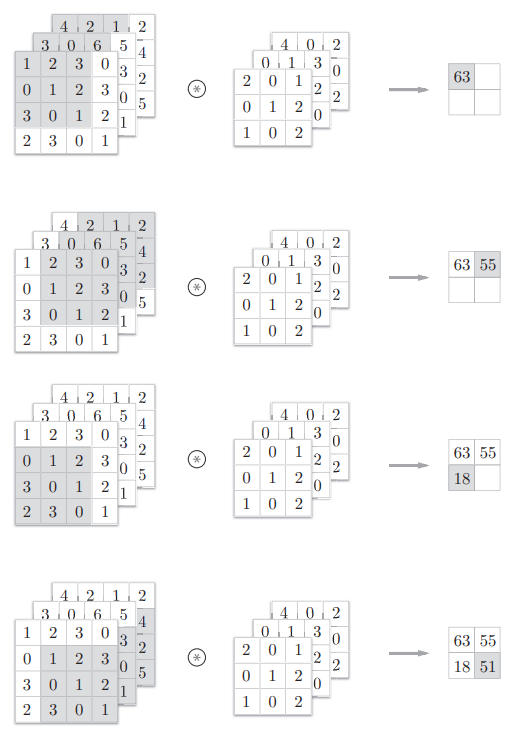
对于3维数据的卷积运算,相比于2维数据的,其在纵深方向(通道方向)上特征图增加了
通道方向上有多个特征图时,会按通道进行输入数据和滤波器的卷积运算,并将结果相加,从而得到输出
需要注意的是,输入数据和滤波器的通道数要设为相同的值
通过立体方块来理解
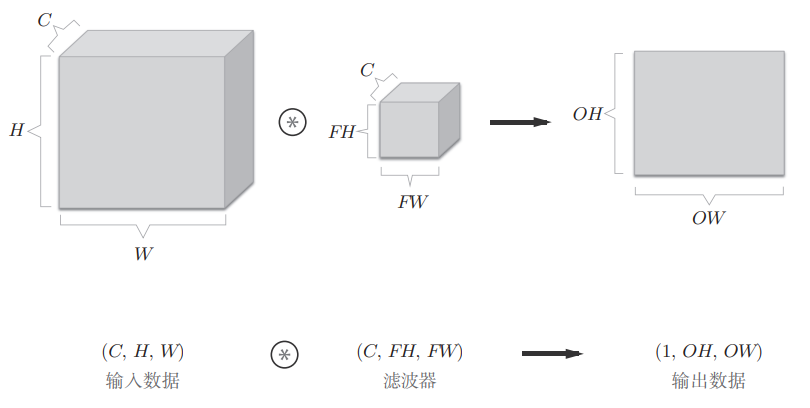
以3维数据为例,把3维数据表示为多维数组时,书写顺序是 $(channel, height, weight)$ 或 $(C,H,W)$,滤波器(卷积核)也是写作这样的形式 $(C,FH,FW)$ ,如下
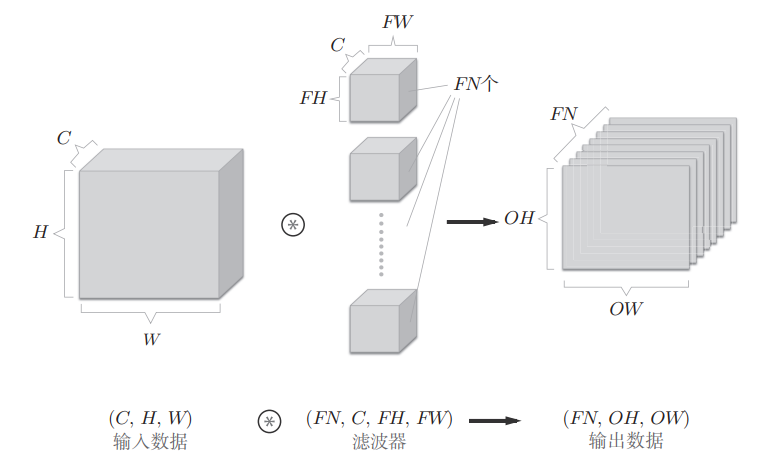
上面的输出数据是一张特征图,也即通道数为 1 的特征图,如果要在通道方向上也有多个卷积核运算的输出,就需要用到多个滤波器(权重),如下
通过使用FN个卷积核,对应的输出特征图也变成了FN个,将这FN个特征图汇集在一起,就得到了一个形状为 $(FN,OH,OW)$ 的方块,再将这个方块传递到下一层,就形成了CNN的处理流
那么4维的数据,卷积核的权重数据的书写顺序应该是 $(FC,CC,FH,FW)$ ,即卷积核个数、卷积核通道数、卷积核高、卷积核宽
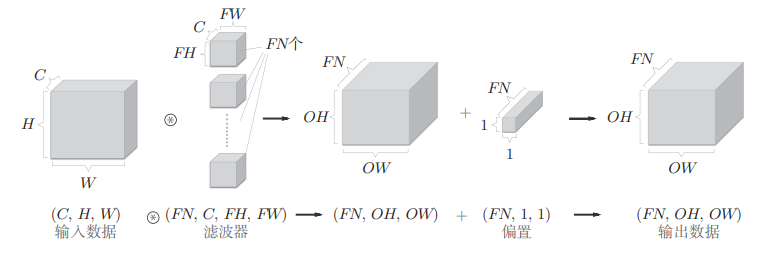
同样,也要加上偏置,如下
注意,偏置的通道数要与卷积核的个数相同
批处理
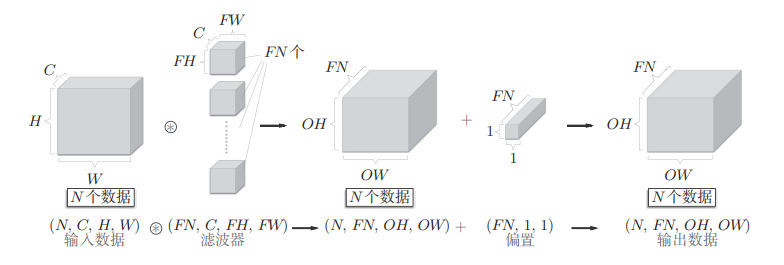
通过批处理,能够实现处理的高效化和学习时对mini-batch的对应。在卷积运算中应用批处理,需要将在各层间传递的数据保存为4维数据,即 $(batch-num,channel,height,weight)$
N个数据的批处理如下,
批处理将N次处理汇总成了一次进行
池化层
池化是缩小高、长方向上的空间的运算
它的主要作用是对输出特征图进行下采样(subsampling or downsampling)
它的作用是
降维、减少计算量和内存开销,当原始输出特征图尺寸较大时,池化可以有效减小后续网络层的输入大小,从而减少参数数量和计算量
提取主要特征、抑制噪声,如Max池化、Average池化、Global池化等
提高模型泛化能力,池化引入了某种程度的位置不变性(translation invariance),使模型对小范围的平移、旋转、缩放更具鲁棒性
防止过拟合,减少特征维度,限制了网络学习过于复杂的模式,有助于抑制过拟合
池化的目的是减小特征尺寸、增强抽象能力、提高效率
补充:池化处理的就是张量,张量(tensor)就是一个具有维度的数值数组,0维是标量,1维是向量,2维是矩阵,3维及以上就是张量
下面是Max池化的处理顺序
这个例子是按照步幅为2进行池化窗口为 2x2 的Max池化操作的,处理的是输出特征图,Max池化是从目标区域(池化窗口)中取出最大值,提取显著特征
一般来说,池化的窗口大小会和步幅设定为相同值
除了Max池化,还有Average池化和Global池化,Average池化则是计算目标区域的平均值,用于平滑特征图;而Global池化是对整个特征图求平均或最大值,常用于分类前最后一层
池化层的特征
没有要学习的参数,池化层和卷积层不同,没有要学习的参数
通道数不发生变化,经过池化运算,输入数据和输出数据的通道数不会发生变化
对微小的位置变化具有鲁棒性,输入数据发生微小偏差时,池化仍会返回相同的结果,如下面的例子
当输入数据在宽度方向上只偏离1个元素时,输出仍为相同的结果,当然,根据数据的不同,有时结果也不相同
卷积层和池化层的实现
CNN中各层间传递的数据是4维数据,即 $(数据个数,通道数,高,宽)$
基于im2col的展开
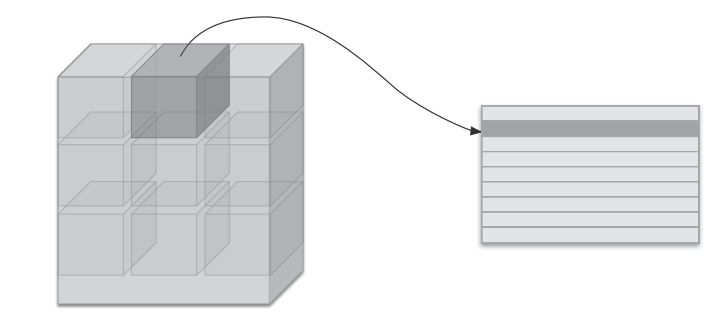
im2col是一个函数,将输入数据展开以适合滤波器(权重),对于输入数据,将应用卷积核的区域(3维方块)横向展开为1列,im2col会在所有应用卷积核的区域进行这个展开处理,如下所示
值得注意的是,滤波器的应用区域几乎都是重叠的,在此情况下,使用im2col展开后,展开后的元素个数会多于原方块(输入数据)的元素个数,因此,使用im2col的实现存在比普通的实现消耗更多内存的缺点。但,汇总成一个大的矩阵进行计算,对计算机的计算颇有益处,因为可以有效地利用线性代数库
另外,im2col 意为 image to column,即图像到矩阵
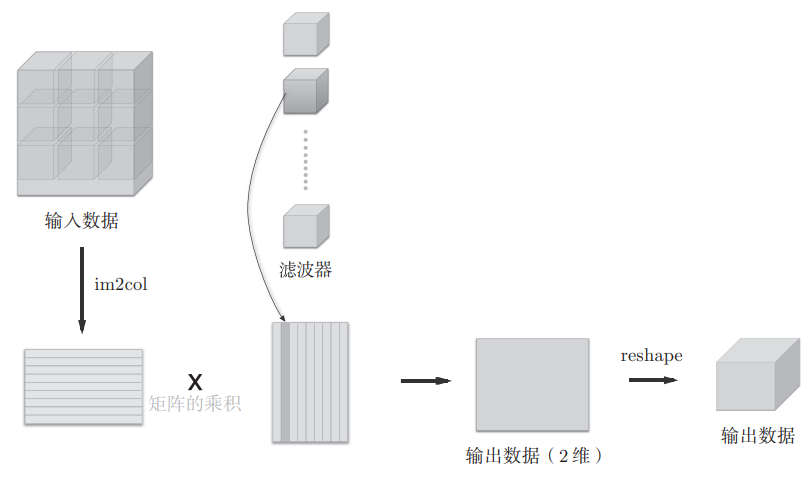
im2col的处理过程如下
使用im2col展开输入数据后,之后就只需将卷积层的滤波器(权重)纵向展开为1列,并计算2个矩阵的乘积即可,这和全连接层的Affi ne层进行的处理基本相同
使用im2col的卷积运算的卷积核处理过程如下
因为CNN中数据会保存为4维数组,所以要将2维输出数据转换(reshape)为合适的形状,这就是卷积层的实现流程
卷积层的实现
在卷积层的实现过程中,有以下几个点需要注意
im2col函数得到的是col,这个col表示 $(输出区域数,每个区域展开后元素个数)$ ,这个输出区域数其实就是 H_out * W_out,它就是经过im2col展开后得到的行数。而第2个参数就是 卷积核大小 * 通道数,即 $FH * FW * C$
卷积层的实现的类中的forward方法里,im2col展开处理后的数据形状 col.shape=(N*out_h*out_w, C*FH*FW),卷积核展开之后的形状 col_W.shape = (C*FH*FW, FN),那么 dot(col, col_W) 得到的输出的形状就是 out.shape = (N*out_h*out_w, FN),这表示为:每一张输入图像,每一个输出位置(out_h*out_w)个,对每一个卷积核(共FN个)都得到一个输出数值。再将得到的输出out还原为 4D 卷积输出张量结构。注意:这里的N是batch_size,也是输入图像的个数;FN是卷积核的个数,也是这层卷积层的输出通道数
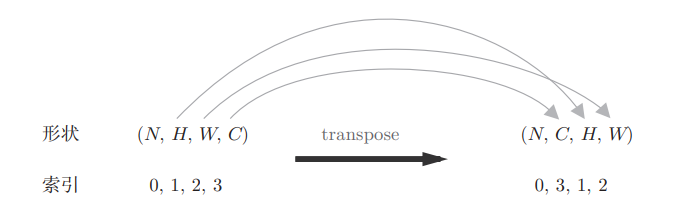
将out还原为4D卷积输出张量结构,这里就有一个新的问题,为什么不能直接使用 reshape 将out.shape变为 (N, FN, out_h, out_w) ?这是因为 reshape 只是重新排列元素的形状,不能改变维度的排列顺序(轴顺序),要改变轴顺序必须使用 transpose,out.shape = ( N * out_h * out_w, FN ),axis=0:N*out_h*out_w,axis=1:FN,reshape不会打乱数据顺序,而transpose是要调整轴的排列的,transpose(0,3,1,2)这里的数值是reshape之后 0N1H2W3C 的下标,不是实际值,最后要调整为NCHW(0,3,1,2),如下图
在进行卷积层的反向传播时,必须进行im2col的逆处理,这里使用一个col2im函数,代码在code里
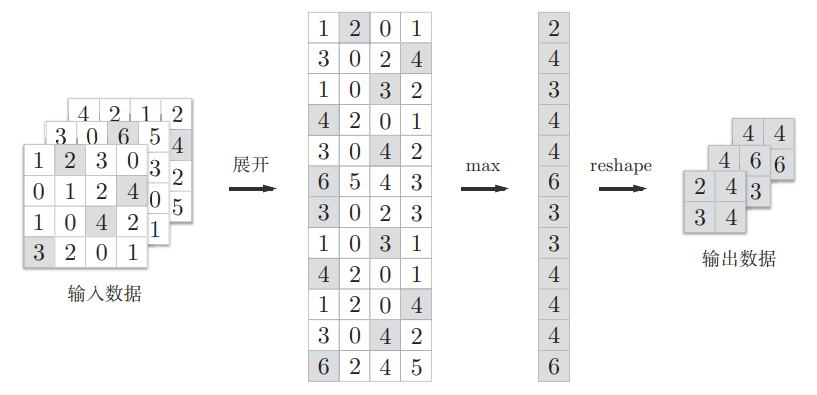
池化层的实现
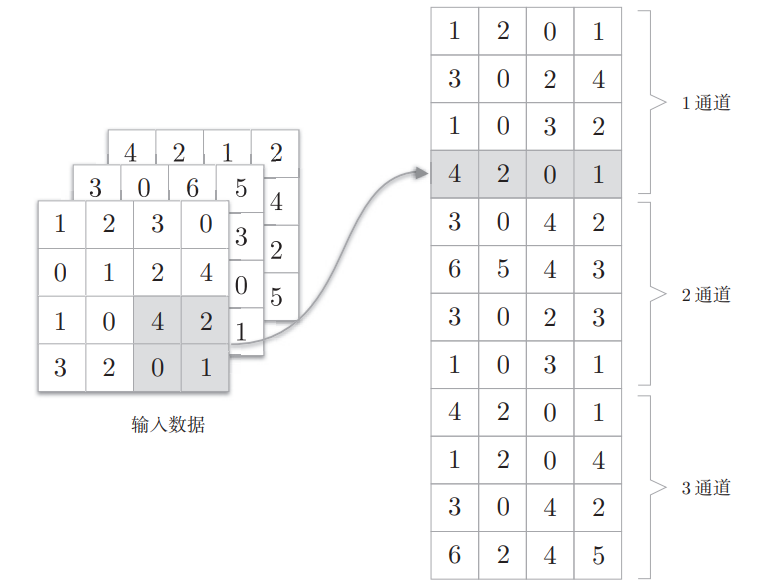
池化层的实现和卷积层相同,都使用im2col展开输入数据,不过,池化的情况下,在通道方向上是独立的,这一点和卷积层不同,也即池化的应用区域按通道单独展开
然后进行Max池化
CNN的实现
有几点需要注意
初始化方法中,池化输出大小的代码如下
其中 conv_output_size/2 是因为后面定义的池化窗口大小为2x2,且stride=2,所以池化后输出的高宽会变为原来的一半,池化层的设定如下
初始化方法中,参数 weight_init_std=0.01 的作用,这是为了控制权重初始化的“数值范围”,防止信号和梯度在网络中“放大或消失”,从而保持网络稳定训练,np.random.randn()是均值为0、标准差为1的正态分布,数值范围在-3到3,这有可能会导致梯度消失或爆炸。而乘以0.01后就变为了均值为0,标准差为0.01的正态分布,则会更稳定一点
CNN的可视化
卷积层的滤波器会提取边缘或斑块等原始信息
具有代表性的CNN
LeNet
AlexNet
Code
卷积层的实现
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
"""
卷积层,实现前向和反向传播。
"""
def __init__(self, W, b, stride=1, pad=0):
self.W = W # 卷积核权重,形状(FN, C, FH, FW)
self.b = b # 偏置,形状(FN,)
self.stride = stride # 步幅
self.pad = pad # 填充
self.x = None # 输入
self.col = None # im2col展开后的输入
self.col_W = None # 展开后的卷积核
self.dW = None # 权重梯度
self.db = None # 偏置梯度
def forward(self, x):
"""
前向传播:im2col展开输入,矩阵乘法实现卷积。
"""
FN, C, FH, FW = self.W.shape # 卷积核参数
N, C, H, W = x.shape # 输入参数
out_h = 1 + int((H + 2*self.pad - FH) / self.stride) # 输出高
out_w = 1 + int((W + 2*self.pad - FW) / self.stride) # 输出宽
col = im2col(x, FH, FW, self.stride, self.pad) # 输入展开
col_W = self.W.reshape(FN, -1).T # 卷积核展开
out = np.dot(col, col_W) + self.b # 矩阵乘法+偏置
out = out.reshape(N, out_h, out_w, -1).transpose(0, 3, 1, 2) # 还原输出形状
self.x = x
self.col = col
self.col_W = col_W
return out
def backward(self, dout):
"""
反向传播:计算输入、权重、偏置的梯度。
"""
FN, C, FH, FW = self.W.shape
dout = dout.transpose(0,2,3,1).reshape(-1, FN) # 调整dout形状
self.db = np.sum(dout, axis=0) # 偏置梯度
self.dW = np.dot(self.col.T, dout) # 权重梯度
self.dW = self.dW.transpose(1, 0).reshape(FN, C, FH, FW) # 还原权重形状
dcol = np.dot(dout, self.col_W.T) # 输入展开后的梯度
dx = col2im(dcol, self.x.shape, FH, FW, self.stride, self.pad) # 还原输入形状
return dxcol2im
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
def col2im(col, input_shape, filter_h, filter_w, stride=1, pad=0):
"""
将im2col展开的二维矩阵还原为原始的多维图像数据。
Parameters
----------
col : 展开后的二维矩阵
input_shape : 原始输入数据的形状(如:(10, 1, 28, 28))
filter_h : 滤波器高度
filter_w : 滤波器宽度
stride : 步幅
pad : 填充
Returns
-------
img : 还原后的多维图像数据
"""
N, C, H, W = input_shape
out_h = (H + 2*pad - filter_h)//stride + 1 # 输出高度
out_w = (W + 2*pad - filter_w)//stride + 1 # 输出宽度
# 还原为im2col前的形状
col = col.reshape(N, out_h, out_w, C, filter_h, filter_w).transpose(0, 3, 4, 5, 1, 2)
# 初始化还原后的图像,注意填充和步幅的影响
img = np.zeros((N, C, H + 2*pad + stride - 1, W + 2*pad + stride - 1))
# 将每个patch累加到对应的位置
for y in range(filter_h):
y_max = y + stride*out_h
for x in range(filter_w):
x_max = x + stride*out_w
img[:, :, y:y_max:stride, x:x_max:stride] += col[:, :, y, x, :, :]
# 去除填充部分,返回原始大小
return img[:, :, pad:H + pad, pad:W + pad]池化层的实现
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
"""
池化层,实现最大池化的前向和反向传播。
"""
def __init__(self, pool_h, pool_w, stride=2, pad=0):
self.pool_h = pool_h # 池化窗口高
self.pool_w = pool_w # 池化窗口宽
self.stride = stride # 步幅
self.pad = pad # 填充
self.x = None # 输入
self.arg_max = None # 最大值索引
def forward(self, x):
"""
前向传播:im2col展开后做最大池化。
"""
N, C, H, W = x.shape
out_h = int(1 + (H - self.pool_h) / self.stride) # 输出高
out_w = int(1 + (W - self.pool_w) / self.stride) # 输出宽
col = im2col(x, self.pool_h, self.pool_w, self.stride, self.pad) # 输入展开
col = col.reshape(-1, self.pool_h*self.pool_w) # 每个池化区域展平成一行
arg_max = np.argmax(col, axis=1) # 最大值索引
out = np.max(col, axis=1) # 最大值
out = out.reshape(N, out_h, out_w, C).transpose(0, 3, 1, 2) # 还原输出形状
self.x = x
self.arg_max = arg_max
return out
def backward(self, dout):
"""
反向传播:最大池化的反向传播,将梯度传递到最大值位置。
"""
dout = dout.transpose(0, 2, 3, 1) # 调整dout形状
pool_size = self.pool_h * self.pool_w
dmax = np.zeros((dout.size, pool_size)) # 初始化梯度
dmax[np.arange(self.arg_max.size), self.arg_max.flatten()] = dout.flatten() # 只在最大值位置赋值
dmax = dmax.reshape(dout.shape + (pool_size,))
dcol = dmax.reshape(dmax.shape[0] * dmax.shape[1] * dmax.shape[2], -1) # 展平成二维
dx = col2im(dcol, self.x.shape, self.pool_h, self.pool_w, self.stride, self.pad) # 还原输入形状
return dx简单的CNN例子
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
import sys, os
sys.path.append(os.pardir) # 添加父目录到模块搜索路径,便于导入common模块
import pickle
import numpy as np
from collections import OrderedDict
from common.layers import *
from common.gradient import numerical_gradient
class SimpleConvNet:
"""
简单卷积神经网络(ConvNet)实现:
网络结构为 conv - relu - pool - affine - relu - affine - softmax。
支持参数保存与加载,支持数值梯度和反向传播梯度。
"""
def __init__(self, input_dim=(1, 28, 28),
conv_param={'filter_num':30, 'filter_size':5, 'pad':0, 'stride':1},
hidden_size=100, output_size=10, weight_init_std=0.01):
"""
初始化网络参数和各层。
input_dim: 输入数据的形状 (通道数, 高, 宽)
conv_param: 卷积层参数字典,包括filter_num, filter_size, pad, stride
hidden_size: 隐藏层神经元数
output_size: 输出类别数
weight_init_std: 权重初始化标准差
"""
filter_num = conv_param['filter_num']
filter_size = conv_param['filter_size']
filter_pad = conv_param['pad']
filter_stride = conv_param['stride']
input_size = input_dim[1]
# 计算卷积层输出尺寸
conv_output_size = (input_size - filter_size + 2*filter_pad) / filter_stride + 1
# 计算池化层输出尺寸(池化窗口为2x2,步幅2)
pool_output_size = int(filter_num * (conv_output_size/2) * (conv_output_size/2))
# 权重初始化
self.params = {}
self.params['W1'] = weight_init_std * \
np.random.randn(filter_num, input_dim[0], filter_size, filter_size) # 卷积核权重
self.params['b1'] = np.zeros(filter_num) # 卷积核偏置
self.params['W2'] = weight_init_std * \
np.random.randn(pool_output_size, hidden_size) # 全连接层1权重
self.params['b2'] = np.zeros(hidden_size) # 全连接层1偏置
self.params['W3'] = weight_init_std * \
np.random.randn(hidden_size, output_size) # 全连接层2权重
self.params['b3'] = np.zeros(output_size) # 全连接层2偏置
# 构建网络层(有序字典保证前向/反向顺序)
self.layers = OrderedDict()
self.layers['Conv1'] = Convolution(self.params['W1'], self.params['b1'],
conv_param['stride'], conv_param['pad']) # 卷积层
self.layers['Relu1'] = Relu() # 激活层
self.layers['Pool1'] = Pooling(pool_h=2, pool_w=2, stride=2) # 池化层
self.layers['Affine1'] = Affine(self.params['W2'], self.params['b2']) # 全连接层1
self.layers['Relu2'] = Relu() # 激活层
self.layers['Affine2'] = Affine(self.params['W3'], self.params['b3']) # 全连接层2
self.last_layer = SoftmaxWithLoss() # 最后一层为softmax+损失
def predict(self, x):
"""
前向传播,输出网络预测结果。
x: 输入数据
返回:输出结果
"""
for layer in self.layers.values():
x = layer.forward(x)
return x
def loss(self, x, t):
"""
计算损失函数值。
x: 输入数据
t: 标签(监督信号)
返回:损失值
"""
y = self.predict(x)
return self.last_layer.forward(y, t)
def accuracy(self, x, t, batch_size=100):
"""
计算预测精度。
x: 输入数据
t: 标签
batch_size: 批大小
返回:精度(0~1)
"""
if t.ndim != 1 : t = np.argmax(t, axis=1) # 若为one-hot则转为标签索引
acc = 0.0
for i in range(int(x.shape[0] / batch_size)):
tx = x[i*batch_size:(i+1)*batch_size]
tt = t[i*batch_size:(i+1)*batch_size]
y = self.predict(tx)
y = np.argmax(y, axis=1)
acc += np.sum(y == tt) # 统计预测正确个数
return acc / x.shape[0]
def numerical_gradient(self, x, t):
"""
用数值微分法计算各层参数的梯度。
x: 输入数据
t: 标签
返回:包含各层权重和偏置梯度的字典
"""
loss_w = lambda w: self.loss(x, t)
grads = {}
for idx in (1, 2, 3):
grads['W' + str(idx)] = numerical_gradient(loss_w, self.params['W' + str(idx)]) # 权重梯度
grads['b' + str(idx)] = numerical_gradient(loss_w, self.params['b' + str(idx)]) # 偏置梯度
return grads
def gradient(self, x, t):
"""
用反向传播法计算各层参数的梯度。
x: 输入数据
t: 标签
返回:包含各层权重和偏置梯度的字典
"""
# 前向传播,计算损失
self.loss(x, t)
# 反向传播,计算梯度
dout = 1
dout = self.last_layer.backward(dout)
layers = list(self.layers.values())
layers.reverse() # 反向传播需逆序
for layer in layers:
dout = layer.backward(dout)
# 收集各层的权重和偏置梯度
grads = {}
grads['W1'], grads['b1'] = self.layers['Conv1'].dW, self.layers['Conv1'].db
grads['W2'], grads['b2'] = self.layers['Affine1'].dW, self.layers['Affine1'].db
grads['W3'], grads['b3'] = self.layers['Affine2'].dW, self.layers['Affine2'].db
return grads
def save_params(self, file_name="params.pkl"):
"""
保存网络参数到文件。
file_name: 文件名
"""
params = {}
for key, val in self.params.items():
params[key] = val
with open(file_name, 'wb') as f:
pickle.dump(params, f)
def load_params(self, file_name="params.pkl"):
"""
从文件加载网络参数。
file_name: 文件名
"""
with open(file_name, 'rb') as f:
params = pickle.load(f)
for key, val in params.items():
self.params[key] = val
# 更新各层的权重和偏置
for i, key in enumerate(['Conv1', 'Affine1', 'Affine2']):
self.layers[key].W = self.params['W' + str(i+1)]
self.layers[key].b = self.params['b' + str(i+1)]手写数字识别的CNN
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
import sys, os
sys.path.append(os.pardir) # 将父目录添加到sys.path,便于导入模块
import numpy as np
import matplotlib.pyplot as plt
from dataset.mnist import load_mnist
from simple_convnet import SimpleConvNet
from common.trainer import Trainer
# 加载MNIST数据集(不展开,保持(N, 1, 28, 28)的形状)
(x_train, t_train), (x_test, t_test) = load_mnist(flatten=False)
# 如果训练速度较慢,可以通过取消注释下方代码来减少数据量
# x_train, t_train = x_train[:5000], t_train[:5000]
# x_test, t_test = x_test[:1000], t_test[:1000]
max_epochs = 20 # 训练的总轮数
# 初始化卷积神经网络
network = SimpleConvNet(
input_dim=(1,28,28), # 输入数据的形状:(通道数,高,宽)
conv_param={'filter_num': 30, 'filter_size': 5, 'pad': 0, 'stride': 1}, # 卷积层参数
hidden_size=100, # 隐藏(全连接)层的神经元数量
output_size=10, # 输出类别数(数字0-9)
weight_init_std=0.01 # 权重初始化的标准差
)
# 设置训练器
trainer = Trainer(
network, x_train, t_train, x_test, t_test,
epochs=max_epochs, mini_batch_size=100, # 训练轮数和每个小批量的样本数
optimizer='Adam', optimizer_param={'lr': 0.001}, # 优化器及其学习率
evaluate_sample_num_per_epoch=1000 # 每轮评估的样本数
)
# 开始训练
trainer.train()
# 保存训练好的网络参数到文件
network.save_params("params.pkl")
print("Saved Network Parameters!")
# 绘制训练集和测试集的准确率随轮数变化的曲线
markers = {'train': 'o', 'test': 's'}
x = np.arange(max_epochs)
plt.plot(x, trainer.train_acc_list, marker='o', label='train', markevery=2)
plt.plot(x, trainer.test_acc_list, marker='s', label='test', markevery=2)
plt.xlabel("epochs") # 横坐标为训练轮数
plt.ylabel("accuracy") # 纵坐标为准确率
plt.ylim(0, 1.0) # 设置y轴范围
plt.legend(loc='lower right') # 图例位置
plt.show()CNN的可视化
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
import numpy as np
sys.path.append('../../py_pro/DL/ch07/')
import matplotlib.pyplot as plt
from simple_convnet import SimpleConvNet
# 可视化卷积核(滤波器)权重的函数
def filter_show(filters, nx=8, margin=3, scale=10):
"""
显示卷积层的滤波器(权重),以灰度图形式排列。
参数:
filters: 卷积核权重,形状为 (FN, C, FH, FW)
nx: 每行显示的滤波器数量
margin: 图像之间的间隔(未使用)
scale: 图像缩放比例(未使用)
"""
FN, C, FH, FW = filters.shape # FN:滤波器个数, C:通道数, FH:高, FW:宽
ny = int(np.ceil(FN / nx)) # 计算需要的行数
fig = plt.figure()
# 调整子图间距,去除边距和间隔
fig.subplots_adjust(left=0, right=1, bottom=0, top=1, hspace=0.05, wspace=0.05)
for i in range(FN):
# 在ny行nx列的子图中添加第i+1个子图,不显示坐标轴刻度
ax = fig.add_subplot(ny, nx, i+1, xticks=[], yticks=[])
# 显示第i个滤波器的第一个通道(通常为灰度图)
ax.imshow(filters[i, 0], cmap=plt.cm.gray_r, interpolation='nearest')
plt.show()
# 创建卷积神经网络实例
network = SimpleConvNet()
# 显示随机初始化后的第一层卷积核权重
filter_show(network.params['W1'])
# 加载训练后保存的参数
network.load_params("../../py_pro/DL/ch07/params.pkl")
# 显示训练后第一层卷积核权重
filter_show(network.params['W1'])