autoware.universe安装后的官方demo运行
先下载官网上的示例地图,autoware_map和autoware在同一路径下
2
unzip -d ~/autoware_map ~/autoware_map/sample-map-planning.zip然后刷新环境变量并运行
2
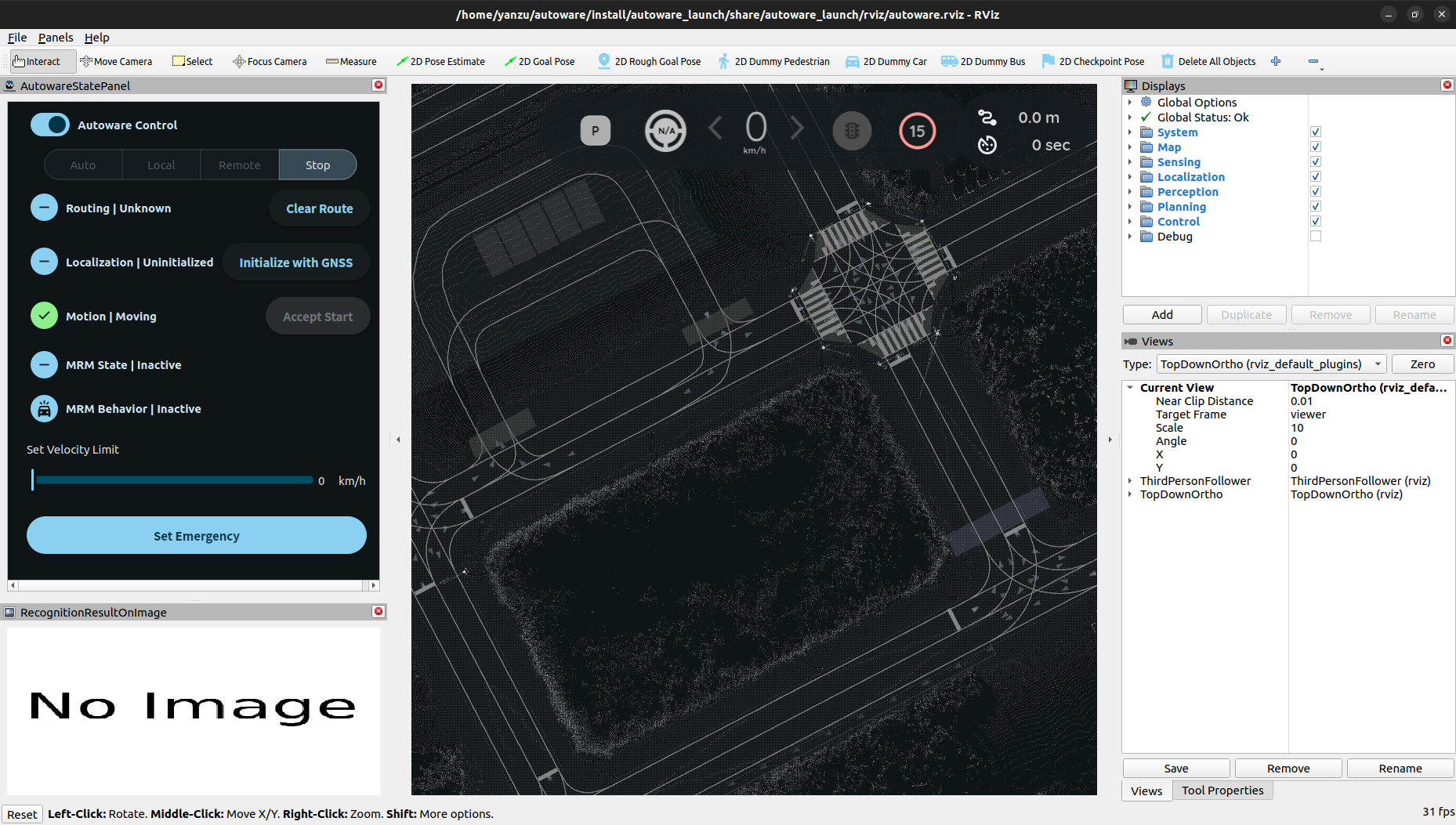
ros2 launch autoware_launch planning_simulator.launch.xml map_path:=$HOME/autoware_map/sample-map-planning vehicle_model:=sample_vehicle sensor_model:=sample_sensor_kit运行起来之后会打开一个叫做 rviz2 的界面,
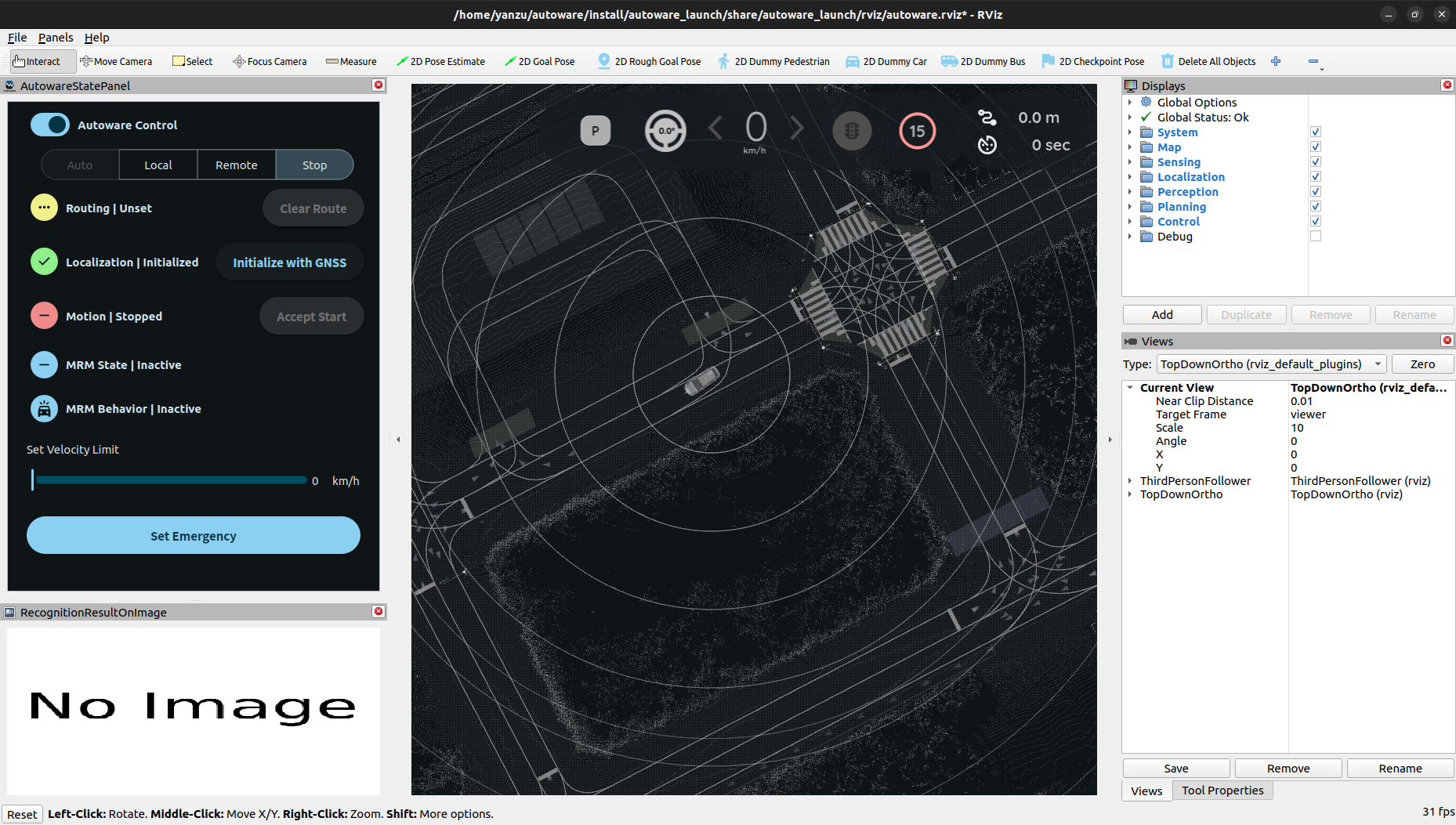
使用 2D Pose Estimate 给定自动驾驶小车的初始位置,
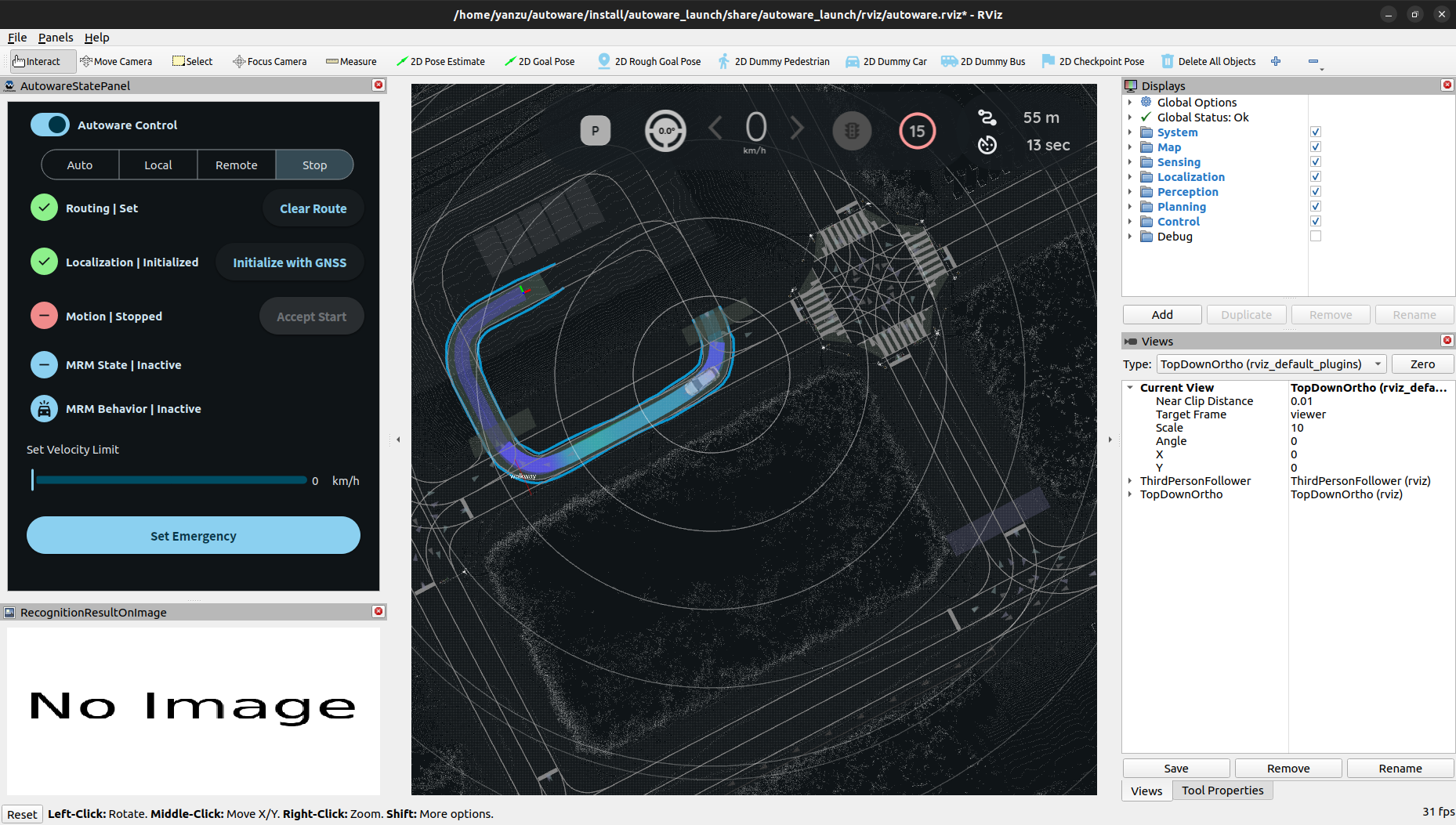
然后使用 2D Goal Pose 指定目标位置,前提是这个目标位置是从初始位置可达的才行,指定了目标位置之后,地图上会出现一条行驶轨迹
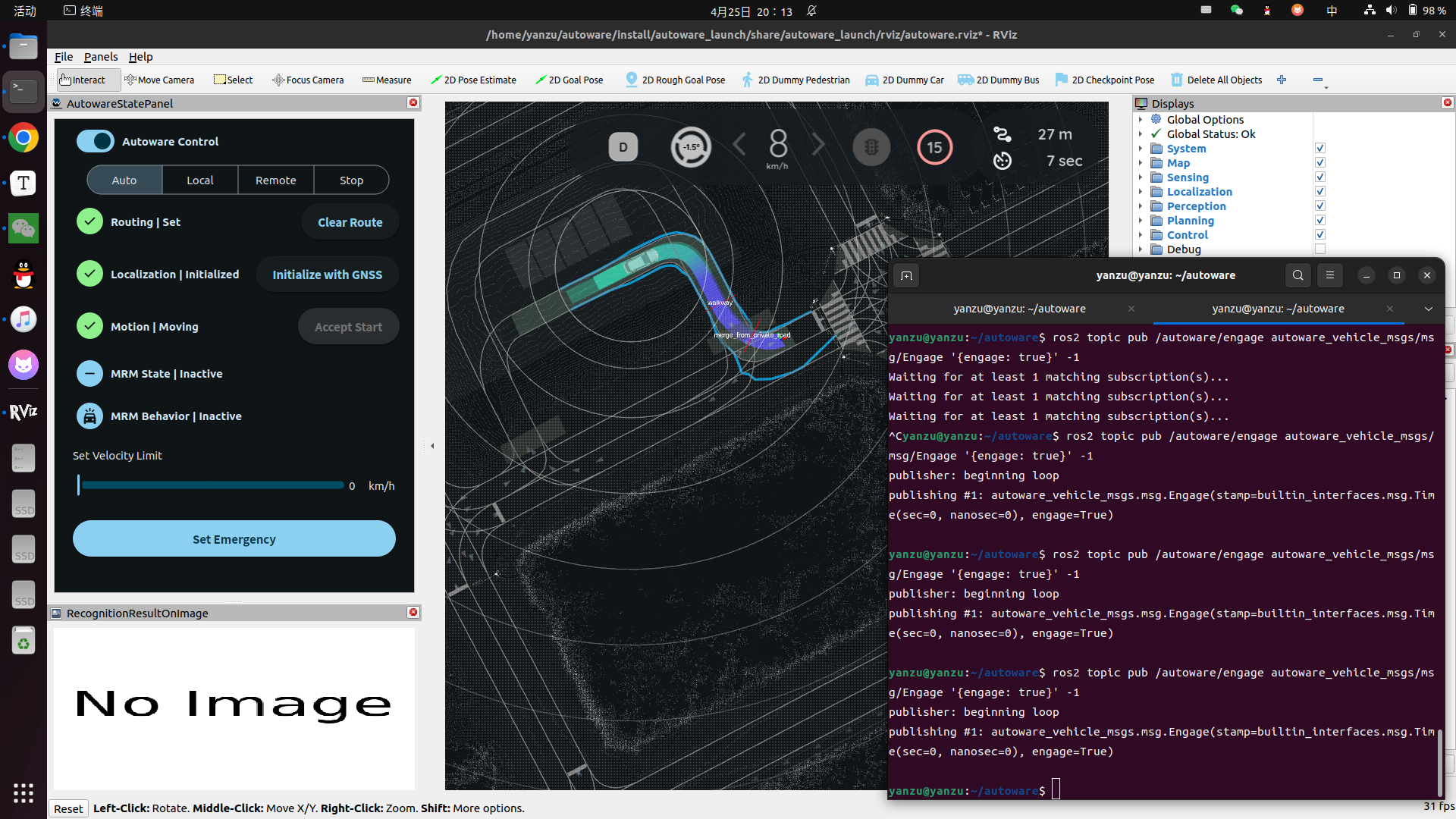
在当前命令框路径下打开一个新的命令框,刷新一下环境变量后,执行以下命令就可以实现小车的自动驾驶了
2
ros2 topic pub /autoware/engage autoware_vehicle_msgs/msg/Engage '{engage: true}' -1